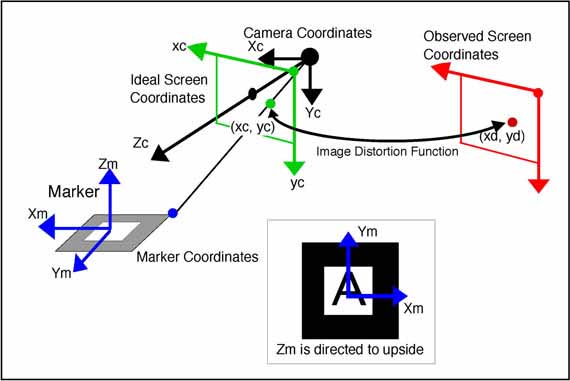
Computer Vision Coordinate System
OpenGL Programming Guide. Addison-Wesley. Copyright.
ARToolKit uses a calibrated camera perspective that typically results in an off-axis projection matrix for OpenGL. Such a projection can not be created by calling gluPerspective, but requires the extra parameters of glFrustum. Rather than decomposing ARToolKit's projection into parameters to pass to glFrustum, we instead directly load the OpenGL projection matrix by setting glMatrixMode(GL_PROJECTION_MATRIX); and calling glLoadMatrix
If you use gsub_lite[apidoc] for the rendering, this off-axis projection is retreived by calling the function arglCameraFrustum[apidoc].
You will find more information on OpenGL coordinate systems in the OpenGL Programming Guide (The Red book)